Aplikasi Kontrol Lift
1. Tujuan [kembali]
a. Memahami tentang cara kerja sensor yang digunakan
b. Mampu memahami rangkaian kontrol lift
c. Mampu megaplikasikan rangkaian pada proteus.
d. Memahami setiap komponen yang digunakan.
2. Alat dan bahan [kembali]

Load Cell
(model 1263)

• Capacities 50–635 kg
• Aluminum construction
• Single-point 600 x 600 mm platform
• OIML R60 approved
• IP66 protection
• Available with metric threads


- Pengatur Waktu Jeda : Digunakan untuk mengatur lama pulsa high setelah terdeteksi terjadi gerakan dan gerakan telah berahir. *
- Pengatur Sensitivitas : Pengatur tingkat sensitivitas sensor PIR *
- Regulator 3VDC : Penstabil tegangan menjadi 3V DC
- Dioda Pengaman : Mengamankan sensor jika terjadi salah pengkabelan VCC dengan GND
- DC Power : Input tegangan dengan range (3 – 12) VDC (direkekomendasikan menggunakan input 5VDC).
- Output Digital : Output digital sensor
- Ground : Hubungkan dengan ground (GND)
- BISS0001 : IC Sensor PIR
- Pengatur Jumper : Untuk mengatur output dari pin digital.

- Catu daya pemanas : 5V AC/DC
- Catu daya rangkaian : 5VDC
- Range pengukuran : 200 - 5000ppm untuk LPG, propane 300 - 5000ppm untuk butane 5000 - 20000ppm untuk methane 300 - 5000ppm untuk Hidrogen
- Keluaran : analog (perubahan tegangan)
- Pin 1 merupakan heater internal yang terhubung dengan ground.
- Pin 2 merupakan tegangan sumber (VC) dimana Vc < 24 VDC.
- Pin 3 (VH) digunakan untuk tegangan pada pemanas (heater internal) dimana VH = 5VDC.
- Pin 4 merupakan output yang akan menghasilkan tegangan analog.



- dihubungkan ke 5V
- GND dihubungkan ke GND
- IN1/Data dihubungkan ke pin 2
- Infra merah : 1,6 V.
- Merah : 1,8 V – 2,1 V.
- Oranye : 2,2 V.
- Kuning : 2,4 V.
- Hijau : 2,6 V.
- Biru : 3,0 V – 3,5 V.
- Putih : 3,0 – 3,6 V.
- Ultraviolet : 3,5 V.


Spesifikasi :
- Built-in gearbox
- Vsuplai : Dc 12V
- Arus : 2 A
- Speed : 400 rpm
- Torsi : 6.5 Kg.cm
- Ratio gear : 1:21
- Dimensi body : panjang 5 cm x diameter 2,5 cm
- Dimensi shaft : panjang 1 cm x diameter 4 mm
- Berat : 0,2 Kg
- Tegangan Karakteristik : 12 VDC
- Arus maksimal : 40 mA
- Frekuensi : 2.8 Khz
- Kenyaringan Minimal : 85 dBa
- Seri : KIB-18

3. Dasar Teori [kembali]
Flame sensor merupakan sensor yang mempunyai fungsi sebagai pendeteksi nyala api yang dimana api tersebut memiliki panjang gelombang antara 760nm – 1100nm. Sensor ini menggunakan infrared sebagai tranduser dalam mensensing kondisi nyala api.
Dalam kebanyakan pertandingan kompetisi robot, pendeteksian akan nyala api misalny lilin masih tetap jadi salah satu aturan yang umum dalam kompetensi lomba yang tidak akan pernah ditinggalkan. Dikarena itulah sensor ini mempunyai peran yang vital yang berfungsi sebagai “mata” bagi robot dalam menyelesaikan tugasnya menemukan posisi nyala api.
Simbol flame sensor :

Biasanya digunakan pada kompetisi robot Cerdas Indonesia atau KRCI baik berbentuk laba-laba maupun seperti tank. Selain itu sensor ini sering juga digunakan untuk mendeteksi api pada ruangan di perkantoran, apartemen, maupun di perhotelan. Suhu normal pembacaan normal sensor ini yaitu pada 25 – 85°C dengan besar sudut pembacaan pada 60°.
B. MQ-2 Sensor GasSensor ini biasa digunakan untuk mendeteksi kebocoran gas baik di rumah maupun di industri. Gas yang dapat dideteksi diantaranya : LPG, i-butane, propane, methane , alcohol, Hydrogen, smoke. Sensor ini sangat cocok di gunakan untuk alat emergensi sebagai deteksi gas-gas, seperti deteksi kebocoran gas, deteksi asap untuk pencegahan kebakaran dan lain lain.

Ketika terjadi proses pemanasan, kumparan akan dipanaskan sehingga SnO2 keramik menjadi semikonduktor atau sebagai penghantar sehingga melepaskan elektron dan ketika asap dideteksi oleh sensor dan mencapai aurum elektroda maka output sensor MQ-2 akan menghasilkan tegangan analog.
Sensor MQ-2 ini memiliki 6 buah masukan yang terdiri dari tiga buah power supply (Vcc) sebasar +5 volt untuk mengaktifkan heater dan sensor, Vss (Ground), dan pin keluaran dari sensor tersebut.

Bentuk dan Simbol Motor DC :
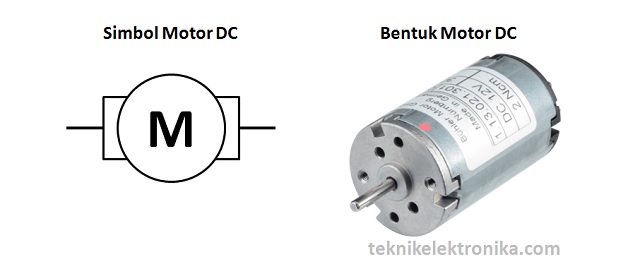
Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.

Cara kerja relay adalah sebagai berikut :
- Saat Coil mendapatkan energi listrik (energized) akan menimbulkan gaya elektromanetik
- Gaya magnet yang ditimbulkan akan menarik plat/lengan kontak (armature) berpegas (bersifat berlawanan), sehingga menghubungkan 2 titik contact
Resistor merupakan komponen elektronik yang memiliki dua pin dan didesain untuk mengatur tegangan listrik dan arus listrik. Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm:
- Symbol Resistor:
-
- Cara menghitung nilai resistansi resistor dengan gelang warna:
1. Masukkan angka langsung dari kode warna gelang pertama
2. Masukkan angka langsung dari kode warna gelang kedua
3. Masukkan angka langsung dari kode warna gelang ketiga
4. Masukkan jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10(10^n)












- Membaca Kode Warna Resistor
- Membaca Resistor SMD
- Menggunakan Multimeter Analog/Digital



- Apabila coil diberikan arus listrik, maka akan timbul gaya elektromagnetik yang dapat menarik armature untuk merubah switch contact point.
- Apabila coil tersebut sudah tidak dialiri arus listrik, maka Armature akan kembali lagi ke posisi Normally Close.
- Umumnya, coil yang digunakan oleh relay untuk mengubah switch contact point ke posisi NC hanya membutuhkan arus listrik yang kecil.




Op Amp Sebagai Penguat Non Inverting
Penguat Non Inverting adalah suatu rangkaian penguat yang berfungsi menguatkaan sinyal dan hasil sinyal yang dikuatkan tetap sefasa dengan sinyal inputannya, hasil dari sinyal input dan output rangkaian non inverting dapat dilihat pada Gambar 1. Pada dasarnya penguat non inverting digunakan sebagai pengkondisi sinyal inputan sensor yang terlalu kecil sehingga dibutuhkan penguatan untuk diproses. intinya penguat non inverting ke balikkan dari penguat inverting.


Fungsi dari penguat non inverting kurang lebih sama dengan penguat inverting hanya saja polaritas output yang dihasilkan sama dengan sinyal inputnya. Keluaran sensor dan tranduser pada umumnya mempunyai tegangan yang sangat kecil hingga mikro volt, sehingga diperlukan penguat dengan impedansi masukan rendah. Rangkaian penguat non inverting akan menerima arus atau tegangan dari tranduser sangat kecil dan akan membangkitkan arus atau tegangan yang lebih besar
Analisis Penguatan Op Amp Non Inverting
Dalam menganalisis rangkaian Op-Amp sebagai penguat terdapat dua aturan penting yang perlu diperhatikan. Kedua aturan tersebut menggunakan karakteristik Op-Amp ideal. Aturan ini dalam beberapa literatur dinamakan golden rule, yang berisi :
1. Perbedaan tegangan antara kedua masukan Op-Amp adalah nol (V+ - V- = 0 atau V+ = V-), hal ini bertujuan menghindari adanya tegangan offset. Aturan pertama ini sering disebut dengan virtual ground.
2. Arus yang mengalir pada kedua masukan Op-Amp adalah nol (I+ = I- = 0), hal ini dikarenakan impedansi input pada Op-Amp sangat besar ( Zin = ∞). Dengan memahami kedua aturan tersebut, analisis dari rangkaian Op-Amp akan menjadi lebih mudah.
Untuk memulai analisis rangkaian penguat non-inverting, terapkan hukum Kirchoff arus pada titik cabang A dan asumsi I+ = I- = 0, sehingga gambar rangkaian penguat non-inverting menjadi seperti Gambar 3.

Persamaan 1
𝐼𝑓 = 𝐼g

Persamaan 3

Dengan menyederhanakan persamaan (3), dapat diperoleh persamaan tegangan keluaran dari penguat non-inverting:
Persamaan 4

Jika penguatan merupakan perbandingan antara tegangan keluaran dan tegangan masukan, maka dari persamaan (4) dapat diperoleh penguatan dari penguat non-inverting yaitu:
Persamaan 5


- Siapkan alat dan bahan pada library proteus
- letakan alat dan bahan tadi pada papan rangkaian di proteus
- selanjutnya hubungkan setiap komponen pada rangkaian dengan kabel,jangan sampai salah karena jika salah maka rangkaian tidak akan bisa berjalan dengan semestinya. Bisa di lihat pada gamabar di bawah.
- selanjutnya ubah Baterai dan relay sesui kebutuhan.
- setelah itu masukan data library sensor Magnet dengan mencarinya pada file c pc masing-masing,jika tidak ada bisa mendownload nya pada link download di bawah
- setelah itu tinggal mengetes rangakaian di proteus.
1.Foto Rangkaian


5. Video [kembali]
6. Link Download [kembali]
- Foto Rangkaian Proteus : Klik Disini...
- File HTML : Klik Disini...Rangkaian Simulasi Proteus : Klik Disini...File Video Rangkaian : Klik Disini...Data sheets :
- Resistor : Klik Disini...
- Relay : Klik Disini...
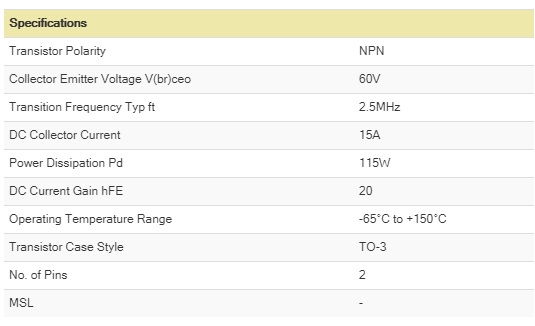
- Transistor : Klik Disini...
- DC Motor : Klik Disini...
- Voltmeter : Klik Disini...
- Dioda : Klik Disini...
- IC Op-Amp : Klik Disini...
- Buzzer : Klik Disini...
File Library :- Touch Sensor : Klik Disini...
- MQ-2 Sensor : Klik Disini...
- PIR Sensor : Klik Disini...
Tidak ada komentar:
Posting Komentar